-
微信二維碼

-
熱線電話
×電話
張經理
17203711177
- 返回頂部
張經理
17203711177
|
|
國家煤監部門重點扶持企業 |
 咨詢熱線: 咨詢熱線: |
| 透地D波應急通信產品、礦山安全通信產品、移動寬帶應急通信產品 | 17203711177 |


UWB定位原理(超寬帶定位)
UWB定位的核心思想只有一句話:
通過測量信號在標簽和基站之間的飛行時間,計算距離,再用多個距離進行三角定位。
就像雷達、聲納一樣,只是它用的是無線電信號。
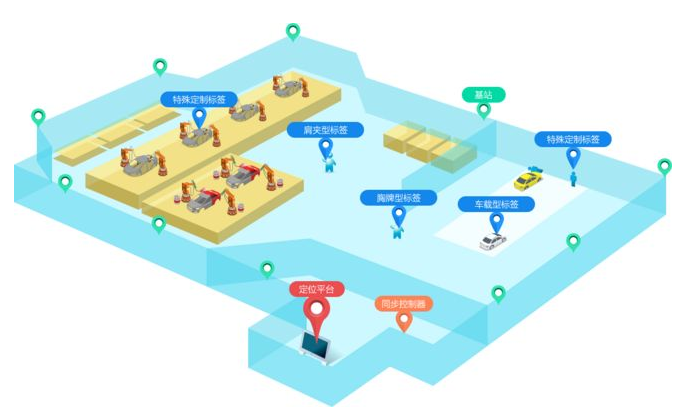
1. 系統由什么組成?
定位標簽(Tag):帶在人或設備上,主動發送信號。
定位基站(Anchor):固定在已知位置,接收標簽信號。
定位引擎(Server):根據基站的數據計算位置。
2. 核心原理:飛行時間(ToF)
UWB定位關鍵的技術是 ToF(Time of Flight)。
過程如下:
1. 標簽向周圍基站發送一個極短的UWB脈沖信號。
2. 基站記錄信號到達的時間。
3. 系統計算信號從標簽飛到基站的時間差。
4. 用公式計算距離:
距離 = 光速 × 飛行時間
因為光速是恒定的,只要時間測量夠準,距離就非常準。
UWB的時間測量精度可以達到納秒級,所以距離誤差可以做到厘米級。
3. 如何得到位置?三角定位
當一個標簽同時被 3個以上基站 看到時,系統就能算出它的坐標。
原理類似:
基站A說:標簽離我5米
基站B說:標簽離我3米
基站C說:標簽離我4米
系統在地圖上畫三個圓,三個圓的交點就是標簽的位置。
這就是 二維定位。
如果有4個以上基站,還能做 三維定位(高度)。
4. UWB為什么精度這么高?
因為它有幾個獨特特性:
信號帶寬極寬 → 抗干擾能力強
脈沖極短 → 時間測量非常精準
穿透力強 → 能穿墻、穿金屬
多徑效應抑制好 → 復雜環境也能準
這些特性讓UWB成為目前室內定位中精度高的技術。
5. 常見定位算法
UWB定位常用兩種算法:
ToF(飛行時間):精度高,常用
TDoA(到達時間差):標簽不需要高精度時鐘,成本更低,但精度略低
6. 一句話總結
UWB定位就是利用極短脈沖信號的飛行時間測量距離,再通過多個基站的距離數據進行三角定位,從而實現厘米級的高精度室內定位。
如果你愿意,我還能給你:
更專業的技術原理解析(含公式)
UWB vs 藍牙AOA vs RFID 的對比
適合你場景的UWB方案(人數、精度、預算)
你需要哪一種?